Dies ist die deutsche Übersetzung des Gedichts Le Voilier, wieder in Form eines Kalligramms.
Der Segler
Des Ostwinds Hauch blähte das Tuch, die Leinen lösten sich, im stillen Morgengrauen erzitterte das Segel. Mit einem sehnsuchtsvollen Röcheln verließ er die Fahrrinne, und sein Bug zerschnitt die widerspenstige Woge. Das Stampfen ließ den Rumpf ächzen; die Wanten klagten im zarten Schweigen. Das Gouvernail – unbeirrt – zeichnete den Kurs, ohne Umweg oder Wiederkehr; Indessen hielten die Bullaugen die Erinnerung der verwaisten Küste fest. II II Sein Lehen wich zurück - mit unergründlicher Scheu. II II Ungeduldig bäumte sich der Wind auf – die Fock knallte scharf. Eine trotzige Gischtträne klammerte sich daran. Sie gab nach – einen Augenblick noch verzögert durch die raue Bordwand – bevor sie sich im Meeresabgrund verlor. Ein Tau knarzte sein trübsinniges Lied, ein Seufzer eines schweren Versprechens. Vom feurigen Böen gepeitscht, zog sich sein entschlossenes Kielwasser ins Grau des Vergessens. Sein Schatten dehnte sich in jener blauen Stunde, gen Horizont, in Aquarell -- Lavendel und Tinte. Doch hinter sich, verschmolzen mit der Morgenröte, glaubte er den Hauch eines Blickes zu spüren, für immer abgewandt.
Jean-Christophe Berthon
Auch hier muss ich am Layout meines Blogthemas arbeiten, da es die Darstellung des Gedichts in Form eines Kalligramms unterbricht, vor allem auf Mobilgeräten.
Voici sûrement la version finale de ce poème. J’ai tenté d’en faire un calligramme, les vers prennent la forme d’un voilier de face. Je dois toutefois adapter le thème de mon blog pour améliorer le rendu. Demain, je commence la traduction allemande.
Le Voilier
La brise du Levant gonfla la toile ; les amarres se délièrent, Faisant frémir la voile dans la quiétude de l‘aurore. D’un râle langoureux, il franchit le chenal, Et sa proue fendit l’onde rétive. Le tangage fit geindre sa carène ; Les haubans gémirent dans ce silence ténu. Le safran - obstiné - traça le cap sans détour ni retour ; Tandis que les hublots retenaient la mémoire de la côte désolée. II II Son fief s’éloignait, avec une insondable retenue. II II Le vent, impatient, rua - le foc claqua d’un coup sec. Une larme rebelle d’écume s’y agrippait. Elle céda - un instant encore retardée par le bordé rêche - avant de se perdre dans l’abîme. Un cordage grinça d’un chant morose, soupir d’une promesse difficile. Cinglé de bourrasques fougueuses, son sillage décidé se dessinait dans l’oubli. Son ombre s’étirait en cette heure bleue vers un horizon en aquarelle - lavande et encre. Mais derrière lui, fondu dans l’aube, il crut sentir le soupçon d’un regard à jamais tourné.
Jean-Christophe Berthon
En traduisant ce poème en allemand, j’ai dû corriger quelques petites coquilles. Par exemple, j’ai découvert que le vent du Ponant est un vent méditerranéen qui souffle d’ouest en est. Or, j’imaginais plutôt ce voilier quitter la Bretagne en direction de l’ouest. J’ai aussi corrigé quelques termes de marines, parce que ce n’est pas facile de rester sur le pont dans la houle sans trébucher sur un cordage…
J’ai voulu écrire un nouveau poème, après la montagne, c’est vers la mer que je me suis tourné. C’est une première ébauche. J’ai envie de travailler quelques tournures et découpages de vers, et de penser sur le rythme. Mais j’aime bien déjà ce résultat.
Le Voilier
Le souffle du Ponant gonfla sa peau de toile, Elle frissonna, puis ses amarres se délièrent. D’un râle discret, il franchit le chenal, Et de sa proue muette, il fendit l’onde. Le tangage fit geindre sa carène tendant les haubans Qui gémirent dans le silence ténu. Le safran traça le cap, seul maître à bord, Tandis que les hublots fermés rêvaient la côte désolée.
Son fief s’éloignait, avec une insondable retenue.
À son foc, une larme d’écume s’agrippait, Glissa sur la bordée, et se perdit dans l’abîme. Un cordage grinça d’un chant morose, Soupir d’une promesse difficile.
Propulsé par les vents, porté par les courants, Son sillage, décidé, se dessinait dans l’oubli. Son ombre s’étirait en cette heure bleue Vers un horizon en aquarelle de lavande et d’encre. Mais derrière lui, fondu dans l’aube, Flottait le soupçon d’un regard à jamais tourné.
Update: Ich habe die deutsche Übersetzung aktualisiert, die nun besser zu den Gefühlen und Wahrnehmungen des französischen Originals passen sollte. Das französische Gedicht ist jedoch noch nicht fertig (es gibt einige Verse, an denen ich noch arbeiten möchte).
Ich wollte dieses Gedicht auf Deutsch übersetzen. Aber es war mir zu schwer. Ich habe eine KI gefragt, und ich denke, dass das Ergebniss anders klingt, aber trotzdem OK. Und für jeden Vers bat ich um Varianten mit einer Erklärung der Unterschiede. Dann versuchte ich, jeden Vers mit diesen Informationen zu konstruieren, und bat dann um ein Korrekturlesen, um den Text grammatikalisch zu korrigieren. Ich benutzte eine andere KI, um eine Rückübersetzung anzufertigen, um zu sehen, ob die Gegenüberstellung einen französichen Text ergab, der das ausdrückte, was ich beabsichtigt hatte.
Der Segler
Der Hauch des Ponant blähte seine Segelhaut, er erzitterte, dann gaben seine Leinen nach. Mit einem leisen Röcheln passierte er die Fahrrinne und mit stummem Bug durchschnitt er die Flut. Das Stampfen ließ den Rumpf ächzen, die Wanten spannten sich und klagten im zarten Schweigen. Das Gouvernail zeichnete den Kurs, alleiniger Herr an Bord, während die geschlossenen Bullaugen von der verwaisten Küste träumten.
Sein Lehen entschwand mit unergründlicher Zurückhaltung.
An seinem Fock klammerte sich eine Schaumenträne, glitt an der Bordwand entlang und verlor sich im Abgrund. Ein Tau knarrte in klagender Melodie, Seufzer eines schweren Versprechens.
Von Winden getrieben, von Strömungen getragen, zeichnete sich seine entschlossene Kielspur ins Vergessen. Sein Schatten reckte sich in jener Blauen Stunde einem Horizont aus Lavendel- und Tintenaquarell entgegen. Doch hinter ihm, im Schmelz der Morgendämmerung, schwebte der Hauch eines für immer abgewandten Blickes.
Am Anfang lohnt es sich, den Blick kurz zur Ruhe kommen zu lassen. Samstag nutze ich gern, um inspirierende Fotos zusammenzutragen. Werde dabei nicht ungeduldig; eine sorgfältige Auswahl schärft das Auge. Ich sortiere Motive nach Licht, Form und Stimmung. Nicht jedes Bild taugt zum Vorbild – wähle bewusst. Vorbeikommen kann außerdem jederzeit eine spontane Idee, die alles umwirft.
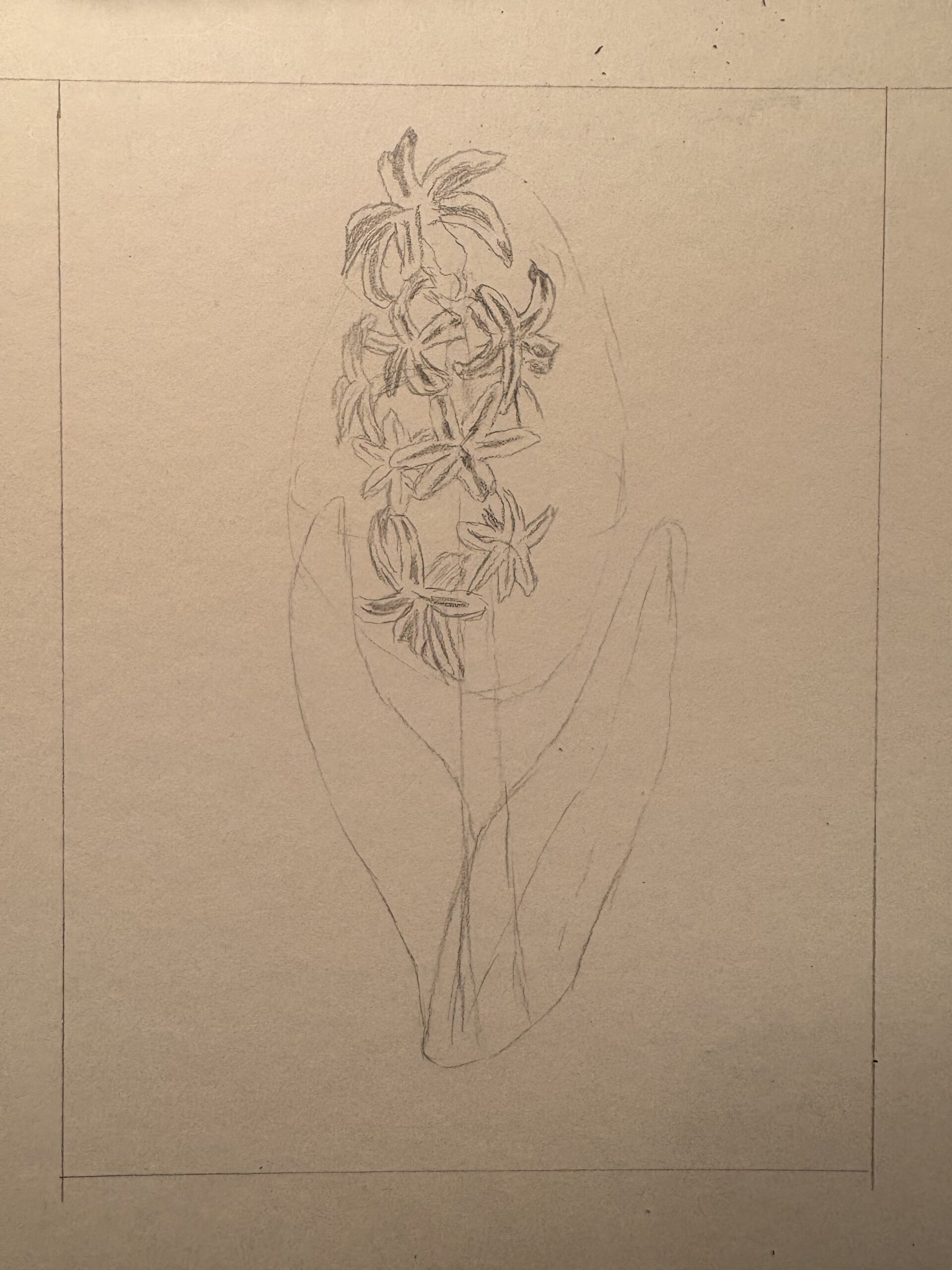
Bevor du überhaupt zum Bleistift greifst, lohnt es sich, eine vielfältige Sammlung von Bildern anzulegen. Suche nach Fotos, die die ganze Pflanze oder sogar ein Beet zeigen, ebenso nach Nahaufnahmen, die den Moment des Aufblühens oder die seidige Oberfläche eines Blütenblatts einfangen. Je mehr Varianten dein Auge sieht, desto tiefer wird dein Verständnis des Motivs.
Vertiefe anschließend dein Wissen: Ein Wikipedia-Artikel oder ein botanischer Führer genügt meist, um die typische Anordnung der Blüten, die Zahl der Blätter und mögliche Farbvariationen kennenzulernen. Diese Recherche verhindert Proportionsfehler und schenkt vor allem das Selbstvertrauen, die Pflanze interpretierend statt mechanisch zu kopieren. Um das Gelernte festzuhalten, gestalte ein Moodboard – analog oder digital. Indem du deine Lieblingsfotos dort sammelst, entsteht eine schnelle Referenz, die dich während des ganzen Prozesses inspiriert.
Die Grundformen skizzieren
Es hilft, mit einer klaren Struktur zu starten. Ist die Mittelachse gesetzt, entsteht sofort Ordnung. Noch bevor Details auftauchen, erkennst du die Proportionen. Zu viele Linien am Anfang verwirren nur. Früh erprobst du leichte Striche, die sich später gut anpassen lassen. Für stabile Formen genügt ein lockerer Griff. Ein gleichmäßiger Druck vermeidet harte Kanten. Wiedersehen wirst du diese ersten Markierungen erst, wenn die Komposition steht.
Grundformen skizzieren
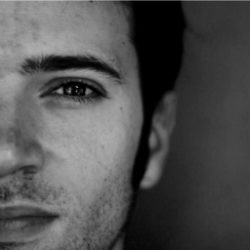
Sobald das Referenzmaterial bereitliegt, setze den ersten Graphitstrich aufs Papier. Zeichne zunächst die vertikale Achse des Stängels – sie bildet die Wirbelsäule deiner Komposition. Skizziere um diese Achse einen hauchzarten Zylinder; darin werden später die Blüten Platz finden. Am Fuß der Pflanze legst du zwei lange, bandförmige Blätter an, bloße Silhouetten, die die Zeichnung erden; weitere Blätter lassen sich bei Bedarf ergänzen. Diese Phase bleibt bewusst grob: Es geht darum, die großen Massen zu positionieren, nicht sofort um Präzision.
Die Blüten Schritt für Schritt aufbauen
Diese Etappe dreht sich um einzelne Blüten. Entscheidung für ihren Rhythmus triffst du schon jetzt. Habe deshalb den Aufbau der sechs Blütenblätter präsent. Ich drehe das Papier leicht, um die Spirale zu prüfen. Aus kurzen Notizen entsteht oft ein konkreteres Bild im Kopf, noch bevor der Stift es zeigt. Respekt vor dem natürlichen Schwung bewahrst du, indem du locker bleibst. Vor jeder neuen Blüte kontrolliere die Gesamtsilhouette. Dir fällt dann auf, wie organisch sich das Muster fortsetzt.
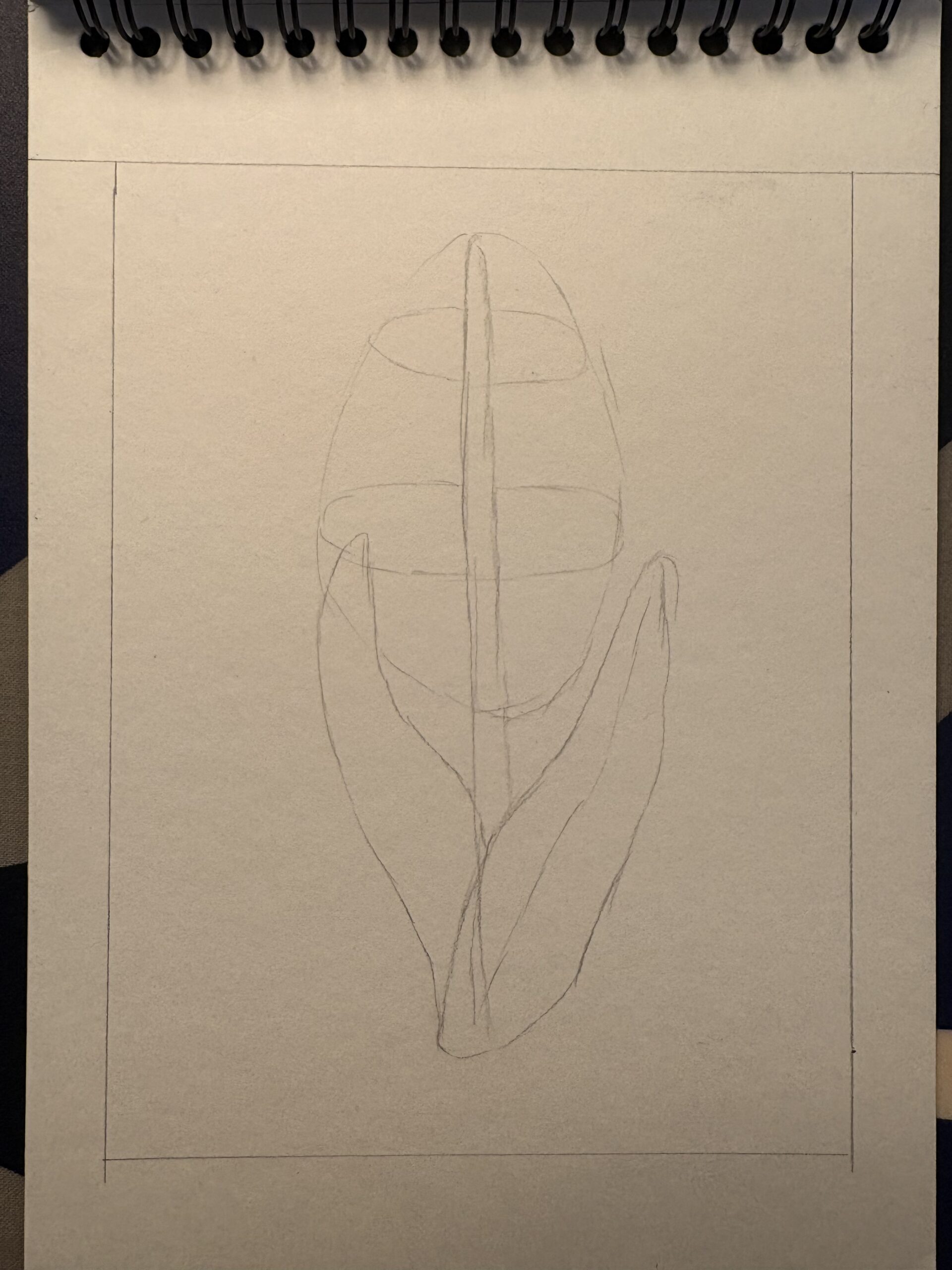
Richte deine Aufmerksamkeit nun auf eine einzige Blüte. Eine Hyazinthe besitzt fast immer sechs Blütenblätter: drei sich gegenüberliegende Paare, die um ein winziges Zentrum kreisen. Um dir diese Struktur einzuprägen, setze zunächst sechs federleichte Striche in Sternform, so zart, dass sie später spurlos wegradiert werden können. Umschließe jedes Segment dann mit dem weichen Umriss eines Blütenblatts.
Wiederhole das Ganze einige Male, bis die Hand den Rhythmus verinnerlicht hat. Sobald die Bewegung vertraut ist, neige die Kronen, platziere einzelne Blüten im Profil oder Dreiviertel-Winkel, damit die natürliche Drehung um den Zylinder erhalten bleibt. Nach kurzer Zeit entsteht ein spiraliges Muster, das die Gesamtsilhouette des Blütenstands deutlich macht.
Blüten und Details aufbauen
Den Blütenstand füllen und verfeinern
Und sobald der Raum dicht wirkt, wechselst du zu den Blättern. Uns helfen dabei dezente Schraffuren, die Volumen andeuten. Getroffen werden Lichtakzente erst ganz zum Schluss.
Arbeite weiter, bis der für die Blüten reservierte Raum dicht und lebendig wirkt. Kehre dann zu den Blättern zurück: Füge ein oder zwei hinzu, betone die Mittelrippe und spiele mit Halbtönen, um ihre fleischige Textur hervorzuheben. Auf dem Stängel setzt du gezielt Lichtakzente; zwischen den Blütenblättern vertiefst du unaufdringliche, aber entschlossene Schatten. Die allmählich aufgebauten Hell-Dunkel-Werte verleihen Volumen, ohne die Frische der ersten Skizze zu ersticken.
Ich muss auch selbst noch weiter daran arbeiten, deshalb habe ich noch keine weiteren Bilder von meiner Zeichnung. Ich hoffe, dass ich sie in den nächsten Tagen hinzufügen kann.
Zeichnen, um zu empfinden
Jede gestalterische Entscheidung – ob du frisch erblühte oder verwelkte Blüten zeichnest, die Pflanze im Topf oder im Gartenboden zeigst, Tau, Regen oder Reif einfügst – ist eine Gelegenheit, eine innere Stimmung auszudrücken. Frage dich: Fühle ich mich zur Lebenskraft eines frühlingshaften Bouquets hingezogen oder zur sanften Melancholie eines verdorrten Stängels? Indem du diese Resonanzen wahrnimmst, übst du Achtsamkeit: Du beobachtest deine Emotionen, nimmst sie ohne Urteil an und verwandelst sie in Linien, Schatten und Nuancen.
Zeichnen als Teil einer emotionalen Selbstfürsorge
Das Zeichnen ist nur eine von vielen Türen zur Gegenwärtigkeit. Ein Spaziergang, ein Musikstück oder einige Yoga-Positionen können dieselbe Funktion übernehmen. Ein persönliches, flexibles „Achtsamkeits-Set“ aus verschiedenen Praktiken zu gestalten hilft oft, kontrastreiche Tage zu meistern: An einem Nachmittag beruhigt der Skizzenblock, am nächsten vervollständigt der Gang durchs Viertel den Prozess. Entscheidend ist das Lauschen auf die Bedürfnisse des Augenblicks und die Freiheit, das Medium zu wechseln, sobald der innere Impuls es verlangt.
Persönlich entdecke ich Aktivitäten wie Zeichnen, Wandern, Radfahren, Beobachten oder Schreiben wieder. Ich schreibe gerne kurze Texte oder Gedichte, oder spiele einfach mit Worten Diesmal haben nur bestimmte Sätze eine andere Bedeutung
Fazit
Ich fasse zum Abschluss die Essenz zusammen. Werde beim Zeichnen bewusst langsamer als gewohnt. Euch wird auffallen, wie sich mit jedem Strich das Bewusstsein klärt. Sehr schnell verschwindet der Drang nach Perfektion. Vermissen wirst du nichts, wenn du ganz im Augenblick zeichnest.
Eine Hyazinthe zu zeichnen ist folglich nicht bloß eine botanische Beobachtungsübung; es ist eine Einladung, das Tempo zu drosseln, bewusst zu atmen und sich selbst wie in einem weichen Spiegel zu betrachten. Ganz gleich, ob du Anfänger*in oder bereits erfahren bist, lass deine Stifte dem Atem folgen; Blütenblatt für Blütenblatt entsteht sowohl eine grafische Blume als auch ein feineres Bewusstsein für den gegenwärtigen Moment. Eine inspirierende Entdeckungsreise wünsche ich allen Zeichnenden.
Manger en suffisance et foudre – les inquiétudes de Jean-Christophe
Ce matin, Jean-Christophe commence la journée avec un énorme petit-déjeuner. Son corps réclame de l’énergie, la mémoire du parcours de mardi est encore fraîche. L’incertitude plane aussi pour la journée : des orages sont prévus, certaines prévisions les prévoient dès le matin, d’autres en début d’après-midi. Une certitude s’impose : il ne faudra pas traîner.
Objectif du jour
Nous prévoyons l’ascension du Mairspitze, puis direction Sulzenau Hütte. Ce parcours nous a été recommandé par un jeune couple de Néerlandais rencontré la veille autour d’un repas chaleureux.
On remonte de nouveau…
Hier nous sommes montés jusqu’à 2754m puis redescendu à 2278m, et aujourd’hui ce sera très similaire. Mais à quoi bon monter et descendre sans arrêt ? Vous le saurez bientôt. La montée est intense, mais pas techniquement difficile. Passé les 2500 mètres, l’altitude se fait sentir et nous oblige à ralentir pour retrouver notre souffle. Arrivés au col, impossible de résister à un petit détour de 5 à 10 minutes pour atteindre le sommet à 2780m. Oui, nous avions dit qu’on ne traînerait pas… mais la vue en valait la peine ! D’un coté, on voit la descente impressionnante de la veille, de l’autre on découvre un nouveau versant avec des glaciers, torrents, lacs et tout petit notre destination.
Prendre le temps mais avec prudence
La descente, comme la veille, est très raide au début avant de s’adoucir, mais elle est bien plus courte. Quelques passages de via ferrata parsèment le chemin, mais rien d’aussi impressionnant qu’hier. Nous sommes ensuite récompensés par un paysage époustouflant de lacs, dont un particulièrement bleu et magnifique. On s’y arrête pour manger et admirer. Parfois un petit rayon de soleil perce les nuages et le lac est comme électrisé. On sent des gouttes de pluie mais rien de menaçant encore. On profite.
Resterons-nous au sec ?
La dernière demi-heure nous offre quelques averses, vite compensées par des périodes de séchage rapide. À peine arrivés au refuge, le déluge débute. Ouf, timing parfait !
Bloqués l’après-midi à cause du mauvais temps, nous passons le temps avec les jeux du refuge. Jean-Christophe s’adonne au dessin pendant que Vera profite d’une sieste réparatrice.
Le ciel se dégage enfin
Après un bon repas du soir et des rencontres très sympa avec 4 autres voyageurs, nous faisons une dernière balade jusqu’à un lac paisible, niché près d’un site mystérieux fait de pierres empilées telles une forêt de cailloux, un lieu chargé de sérénité.
Moral de la journée : malgré les prévisions capricieuses, chaque détour et chaque rencontre ajoutent une touche de magie à l’aventure.
Dans les prochains jours, j’ajouterais les photos mais il faut que je fasse le tri d’abord (plus de 700 photos ont été prises). Puis je traduirais les récits en allemand (il faudra cliquer sur l’article pour voir la traduction allemande en deuxième partie).
Les jours 4 et 5 sont en préparations aussi.
Deutsch
In den nächsten Tagen würde ich die Fotos hinzufügen, aber ich muss zuerst sortieren (mehr als 700 Fotos wurden aufgenommen). Dann würde ich die Erzählungen ins Deutsche übersetzen (man muss auf den Artikel klicken, um die deutsche Übersetzung im zweiten Teil zu sehen).
Die Tage 4 und 5 sind ebenfalls in Vorbereitung.
Teasers
Lys MartagonInnsbrucker HütteRepos à la Bremer HütteMairspitzeGrünauseeBlaue LackePaysage de la vallée de Stubai
Für die deutsche Version gehen Sie bitte zu Seite 2 dieses Artikels (siehe Ende des Artikels).
Matin sans stress
Après l’étape éprouvante d’hier, la promesse d’un orage cet après-midi ne nous fait même pas lever un sourcil : seulement 3 à 4 heures de marche au programme, et surtout du dénivelé négatif – pour le plus grand plaisir de Jean-Christophe… Nous traînons donc un peu, savourant le silence du refuge avant de reprendre le sentier.
Entre tourbières et souvenirs d’Islande
Le chemin serpente d’abord entre plans d’eau et tourbières de montagne ; les linaigrettes – herbes à coton – agitent leurs pompons blancs comme des coton-tiges géants. Instantanément, les paysages d’Islande nous reviennent en mémoire. La montée est douce, on peut profiter pleinement du paysage sans risquer un faux-pas… puis, soudain, elle se cabre : pente raide, nous rangeons nos bâtons et utilisons pieds et mains pour monter, et pour finir une via ferrata aisée mais délicieusement ludique avec une pointe d’acrobatie.
Col du Simmingjöchl
Au sommet, l’ancienne Zollhütte sert encore d’abri de secours. Le vent pique, tout le monde enfile pulls et coupe-vent… sauf quelqu’un, devinez qui ?
Devant nous, un nouveau versant se déploie : des blocs de gneiss brut, tel un chaos rocheux idéal pour bondir de pierre en pierre, plus bas des torrents, petits lacs et cascades. Jean-Christophe – euphorique – se transforme en chamois, sous le regard étonné de Vera qui se demande ce qu’il a dû manger.
Rencontre avec un troupeau de bouquetins
Un mouvement attire son attention : deux longues cornes comme des cimeterres émergent de la crête. En un instant, nous repérons un troupeau entier de bouquetins. Pause déjeuner improvisée, regards pointés. Le mâle dominant reste impassible, allongé, ne se levant qu’à la fin pour se gratter le dos avec ses cornes. Autour de lui, les jeunes jouent au bélier.
Les joies des noms d’animaux qui se baladent d’une langue à l’autre
Jean-Christophe, amoureux de la montagne et de la nature, montre ces bouquetins à des randonneurs croisés en chemin. « Regardez ces animaux ! » dit-il en pointant du bâton, car il ne connait pas le terme dans les autres langues (anglais, allemand ou néerlandais). Et là, les visiteurs internationaux sortent leur arsenal linguistique. En allemand ? “Gämse”. En néerlandais ? “Gems”. En anglais ? “Gems”. Oups… sauf que non, ce sont tous là des mots pour décrire un chamois, or ce sont des bouquetins !
Mais d’où vient cette confusion ? En Afrique du Sud, les anglophones appellent une certaine antilope “gemsbok”. Et le “steenbok” ? Encore une autre antilope là-bas. Est-ce que cette confusion viendrait de là ?
Les vrais termes sont “Steinbock” en allemand, “steenbok”en néerlandais et “steinbock” ou “ibex” en anglais. On y perdrait presque notre latin ! … il faudrait d’ailleurs adapter cette expression française pour la circonstance, car on y perdrait plutôt son germain !
Bref, entre les bouquetins, les chamois, les antilopes et les traductions approximatives, il y a de quoi donner le vertige. Après tout, ce sont les mêmes anglophones qui appellent les Néerlandais “Dutch” et les Allemands “German”. La confusion ? Une tradition ancestrale !
Il faut bien l’admettre, ce jeu est aussi le petit péché mignon de Jean-Christophe. D’ailleurs, c’est lui-même qui a eu la brillante idée de rebaptiser la charmante ville de Gschnitz en « Gschwitzt ». Pourquoi ? Eh bien, après avoir affronté la chaleur torride de lundi dernier, il s’est senti comme dans un bain turc, souvenez-vous. En allemand, « j’ai beaucoup transpiré » se dit « ich habe viel geschwitzt », et visiblement, Jean-Christophe a voulu immortaliser son exploit en sueur dans la toponymie locale !
Gneiss et pierres rouillées
La descente commence sur de vastes dalles grises, polies et striées par d’anciens glaciers. Certaines plaques scintillent, d’autres virent au brun-rouge : le fer qu’elles contiennent s’oxyde et, chauffé par le soleil, rend la pierre plus tiède sous la main que d’autres.
Petit paradis et marmotte timide
Le sentier franchit des névés, traverse un désert de pierraille, puis débouche sur une clairière idyllique : un torrent paresseux, des mares teintées d’ocre par la rouille, des touffes de linaigrettes. Vera file, tandis que Jean-Christophe se fige pour guetter une marmotte. Patience récompensée : museau pointé, clic-clac, souvenir capturé.
Vertigo à répétition
La suite n’est qu’un enchaînement de descentes abruptes, ponctuées de petites vie ferrate – certaines faciles, d’autres un brin plus techniques, et toujours spectaculaires. Tout en bas, un pont branlant enjambe un torrent mugissant ; il oscille sous nos pas, souvenir lointain de l’Annapurna.
Balade bucolique finale
Le relief s’adoucit enfin : rochers lustrés, ruisselets chantants, trilles d’oiseaux-sentinelles, tapis de fleurs odorantes. Vera détecte même du thym sauvage dont le parfum embaume les derniers mètres.
Arrivée à la Nürnberger Hütte
Le refuge apparaît. Jean-Christophe, affamé depuis hier, fond sur le comptoir : énorme assiette de spaghetti bolognaise (le fameux Bergsteigeressen) suivie d’une portion de Kaiserschmarrn, plat sucré typiquement autrichien. Il rayonne, repu, tandis que l’orage gronde au-dehors.
Bilan du jour : marche plutôt courte, mais une mosaïque de paysages, une harde de bouquetins sur une crête abrupte et un cours express de linguistique montagnarde. Demain ? On verra bien : la météo peut bien faire la grimace, nous avons retrouvé nos forces… et notre sens de l’humour.
Für die deutsche Version gehen Sie bitte zu Seite 2 dieses Artikels (siehe Ende des Artikels).
L’orage d’hier soir a été très violent. Les torrents ont débordé, l’eau sauvage a trouvé de nouveaux chemins pour dévaler les côtes. Pouvons-nous encore continuer notre randonnée ?
Coupé du monde
Réveil à 06:00 du matin, afin de se restaurer avant une longue marche et de prendre des nouvelles pour notre route. Des nouvelles ? Il n’y en a pas. Nous sommes coupés du monde, l’internet et le téléphone ne fonctionnent pas. Impossible de savoir si notre parcours est praticable. Le temps de finir le petit déjeuner et de préparer quelques sandwiches pour midi, nous apprenons que la vallée de Gschnitz – bravo à ceux qui remarquent qu’on a démarré là-bas – est en partie bloquée. Il y a eu un éboulement, un pont est cassé et des gens sont en train d’être évacués par hélicoptère. Heureusement que nous n’avons pas garé la voiture à cet endroit pour le retour ! Par contre, pour la rando vers la Bremer Hütte, nous restons sur notre faim. Toujours pas d’information. Alors que faire ?
06:13 – tout parait calme
Une idée
Le Hüttenwirt (le gestionnaire du refuge) nous déconseille de partir et nous indique qu’un hélicoptère viendra vers 08:00 pour inspecter le chemin. Il faudrait donc attendre. Mais la météo hier annonçait des orages pour l’après-midi. Était-ce toujours d’actualité ? Si oui et que le chemin est possible, il nous faut partir maintenant.
Jean-Christophe propose un plan. Il faut 7 h de marche pour atteindre notre prochaine étape. Donc allons-y, soit nous rencontrons rapidement un obstacle et nous faisons demi-tour et passons une nuit de plus ici; soit si au bout de 3 h 30 de marche, nous ne rencontrons personne venant dans l’autre sens, alors sur la deuxième moitié de notre chemin il y a un obstacle mais nous aurons le temps de rebrousser chemin avant le prochain orage.
Alors en route !
Un chameau métaphorique à trois bosses
Notre chemin fait 11 km avec 830 m de dénivelé ascendant et 780 m descendant. Il fait chaud et le soleil cogne déjà alors qu’il n’est que 07:15 lors de notre départ. Sur la route qui grimpe, on entend les tak, tak rythmés de nos bâtons, suivi du crissement, des cailloux sous nos chaussures, et de temps à autre, tel un triangle de musique les tschip, tschip d’un oiseau. Entre-temps un jeune couple sportif nous dépasse, puis deux guides de montagne avec pioche et pelle s’arrêtent à notre hauteur pour nous dire de faire demi-tour, mais sans explication, avant de poursuivre le chemin. Nous continuons car avec notre plan nous ne prenons pas de risque et sans explication ça ne sert à rien comme information. Et si le chemin est vraiment impassable, ces quatre personnes reviendront.
Marche au milieu de névé de billes de grêleLac en tenu de camouflage après l’orageÇa monte, Jean-Christophe sourit encore…
Enfin, arrivé en haut de notre premier col, une magnifique vallée s’ouvre à nous, ainsi que la vue d’une rude descente, et celle de notre premier animal alpin (?), un chameau à trois bosses ! Oui, Jean-Christophe vient de regarder le profil du chemin et nous avons trois cols, et sachant qu’il n’aime pas les descentes, le voilà en joie à la vue de cet animal allégorique.
Une vallée verdoyanteÇa descend, mais il essaye de garder le sourire pour la photoHaaaaaa Ici les lacs sont de couleur cielEt hop, on remonte déjàAu loin notre col précédent avec la descente et montéeUne gentiane alpine – non on n’utilise pas celle-ci pour l’alcool éponymePas de faux pas…Deuxième bosseEt un nouveau creux / vallée …. haaaaaaAu moins une est contente
Vie Ferrate
À notre grand plaisir, le chemin offre plusieurs fois des vie ferrate (via ferratas ? Le français et ses emprunts à l’italien… :haussement d’épaules:). Pour ceux qui ne connaissent pas ce terme, c’est un itinéraire en montagne aménagé avec des câbles, des échelles, des prises et des ponts métalliques, qui permet de progresser sur des parois rocheuses en meilleure sécurité, quand on a l’expérience. C’est un mélange d’alpinisme et d’escalade. Toutefois, sur notre chemin, elles ne nécessitent pas de baudrier et de longes, pour des gens expérimentés, elles sont faciles.
Là, ça parait facile sauf que quelqu’un va avoir les pieds mouillésEt on descend…… et on continue
Le temps presse
Le temps est monotone comme un métronome. Il avance avec constance alors que nous, nous avançons au rythme des difficultés du chemin et de la contemplation du paysage. Je dis « et » mais c’est plutôt un ou exclusif, le chemin est dangereux. Donc il faut soit se concentrer sur où l’on doit faire le prochain pas, ou alors s’arrêter à un endroit sûr et apprécier le paysage. Un faux pas et c’est parfois 500 m de dénivelé : comme sur la lune, en montagne il vaut mieux faire des petits pas si on ne veut pas finir comme Ötzi !
La gentiane jaune – c’est elle qu’on utilise pour l’apéroOn marche ou on regarde mais pas en même tempsJoubarbe de montagne – SempervivumSilène acculeAnémone des Alpes souffrée
Obstacles imprévus
Cette deuxième vallée offre un paysage éclatant de fleurs contrastant avec la rudesse et la caillasse de la première partie de notre parcours d’aujourd’hui. Cependant, la beauté florale cache des défis imprévus : les torrents gonflés par l’orage de la veille ont creusé des tranchées impressionnantes, rendant la traversée plus complexe.
La marche s’étire, rythmée par des franchissements d’éboulis de pierres et de ravins. Chaque pas est une aventure, chaque obstacle un défi que nous relevons avec détermination. Après avoir conquis notre deuxième col, une décision s’impose : nous sommes à mi-chemin et nous n’avons croisé personne, que faire ?
Continuer ou rebrousser chemin?
Notre plan était qu’à mi-chemin si nous n’avions croisé personne, il nous faudrait faire demi-tour. Mais voilà, nous sommes arrivés à ce point et il n’y a toujours personne. Par contre, le jeune couple sportif et les deux guides ne sont pas revenus. Donc il nous semble que le chemin est passable. Et jusqu’à présent, il y a eu quelques obstacles mais rien de dangereux et aussi il nous semble que dans cette vallée, l’orage a été moins violent.
Alors c’est décidé, nous continuons.
Nous nous attaquons au dernier col, notre plus gros dénivelé ascendant de la journée. Après quoi, nous arrivons à un croisement. Notre chemin et une alternative qui passe par un lac.
Bain alpin
Un sentier parallèle attire notre curiosité. Il promet un panorama autour d’un lac dont d’autres randonneurs nous ont décrit comme magnifique. Jean-Christophe, toujours stratégique, apprécie particulièrement cette option : moins de descentes à affronter ! Cette nouvelle voie nous mène à un lac d’un bleu profond et cristallin, une véritable perle nichée au creux des montagnes. L’eau est glacée, mais la chaleur accablante ne nous freine pas. Vera, intrépide, plonge sans hésiter, suivie de près par Jean-Christophe, qui y trouve un soulagement pour ses pieds fatigués. Il a eu une douche froide hier, aujourd’hui juste les pieds, cela est bien suffisant, non ?
On y est presque – pause au lac LauterseeVera dans le LauterseeLautersee intime
Dernières bonnes surprises de la journée
Le ciel s’assombrit, annonçant de nouveaux orages. Nous accélérons le pas vers notre prochain défi : une via ferrata plus technique que celles déjà franchies. La paroi est vertigineuse, le dénivelé pas mal non plus. Ma montre, malheureusement à court de batterie, ne pourra pas immortaliser cette performance en chiffres. Mais qu’importe, le souvenir est gravé dans nos esprits.
À la sortie de la via ferrata, un sentiment de fierté nous envahit. Le refuge apparaît enfin, et presque à l’heure du dîner, ce qui satisfait énormément Jean-Christophe. Oui, affamé et après avoir épuisé ses quatre barres de muesli (au lieu des deux prévues), il retrouve le sourire. Nos deux randonneurs profitent de quelques rayons du soleil que les nuages n’ont pas encore chassés, et se reposent sur une chaise longue.
Le soir tombe, apportant fraîcheur et sérénité. Tandis que la plupart enfilent des pulls, Jean-Christophe, fidèle à lui-même, reste en t-shirt. Peu lui importe le froid, captivé par la vue spectaculaire des montagnes. Il capture l’instant en photo, peut-être pour en inspirer un futur dessin.
Chauffe pied naturelClin d’oeil à Brême de la Bremer HütteInspiration pour un future dessin ?
Un jour de randonnée mémorable, marqué par des paysages enchanteurs, des défis relevés et des souvenirs gravés pour toujours.
Ces dernières 24h ont été merveilleuses, mais il faudra attendre pour les articles car on n’avait pas de réseau du tout. Et là en pleine montée à 2750m d’altitude au milieu d’un chaos de roches, le téléphone interrompt le bruit du torrent dans la vallée, au début je me suis demandé quel drôle d’oiseau coupe notre méditation ascendante
cet après-midi nous serons au prochain refuge, dont j’ai oublié le nom si j’ai du réseau j’essaierai de poster les autres articles. Bonne journée !
Für die deutsche Version gehen Sie bitte zu Seite 2 dieses Artikels (siehe Ende des Artikels).
Départ – 1200m
Sous un ciel de juin déjà caniculaire, nous quittons les maisons typiquement tyroliennes de Gschnitz et attaquons d’emblée un mur : 1100m de dénivelé pour seulement 7km. Les prairies sont des pastels de couleurs, les vrombissements des insectes sont parfois interrompus par une clarine, et Jean-Christophe fait halte à chaque bouquet floral pour immortaliser pétales et antennes. Un papillon orange dentelé de noir confond sa main avec une fleur.
Maison TyrolienneColéoptèresScène de chasse sur une margueriteCirse à feuilles variables et son bourdonLys MartagonMélitée du mélampyre (papillon) et son perchoir
Chaleur – 1600m
Le thermomètre indiquait 25°C à notre départ à 09:30 et les orages sont annoncés pour l’après-midi, là Jean-Christophe découvre un phénomène nouveau : transpirer à flots. Après deux heures de marche, il se sent dans un hammam sans murs — trempé comme jamais sans la moindre goutte de pluie. La gourde se vide et se remplit déjà, merci le torrent !
Il fait chaudNon il n’a pas plu
Peu à peu au-dessus des arbres – 1900m
Une pause déjeuner expresse à l’ombre, et nous repartons sur un sentier qui se cabre davantage. Peu à peu, nous franchissons la limite forestière ; avec l’ombre disparaît notre protection solaire, ça tape. On ne traîne pas car les orages sont difficiles à prévoir en montagne. Heureusement, l’air se rafraîchit et les Zéphyrs jouent avec nous. Un banc providentiel nous fait un clin d’œil : on cède. Les “Energy Balls” pistache salée promettent de l’énergie ; le plaisir gustatif, visiblement, n’était pas dans la recette.
GschnitztalEn routeReposEncore souriant…
Refuge en vue – 2360 m
La silhouette de l’Innsbrucker Hütte se découpe enfin. Sur la terrasse, un Bergsteigergetränk (littéralement “boisson du montagnard” : eau + sirop) nous accueille, mais Jean-Christophe vise d’abord la douche : un euro les trente secondes d’eau chaude, le calcul est vite fait ; il opte pour la version froide … c’est vraiment froid !
Pendant qu’il grelotte, Vera choisit la voie inverse : simple rafraîchissement et repos éclair avant d’enfiler son harnais pour la via ferrata à quinze minutes du refuge. Elle revient juste à temps avant la douche gratuite : pluie en cascade – au moins elle est plus chaude que la douche du refuge, puis grêle drue – exfoliation intégrale, offerte par la montagne.
On est content d’être à l’abri. L’orage fait rage. L’électricité est brièvement interrompue pendant plusieurs minutes. Puis, les torrents qui étaient à sec couvrent de leur rugissement les grondements du tonnerre. Ils sont violents et débordent sur le chemin que nous devrons emprunter le lendemain.
Seront-ils encore praticables ?
On aperçoit le refuge (au milieu de la photo)On est arrivéNotre chambre, en dortoirDéluge de grêlePuis les torrents débordentLà sous les torrents violents il y a notre chemin










































 si j’ai du réseau j’essaierai de poster les autres articles. Bonne journée !
si j’ai du réseau j’essaierai de poster les autres articles. Bonne journée !
















